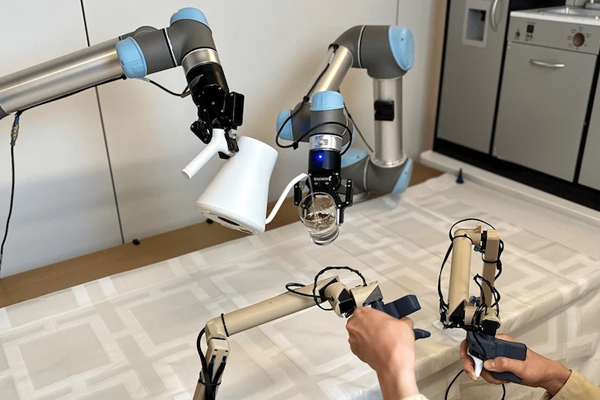
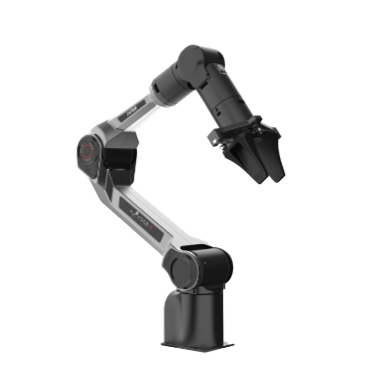
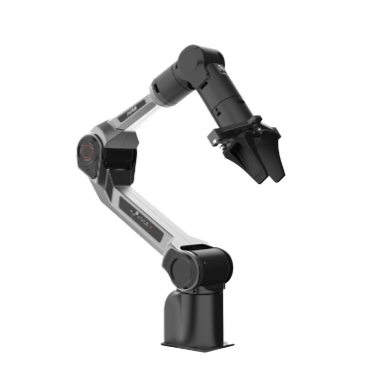
買機器人,上BFT Buy Robots by BFT Robotics 我們的優勢 BFT-Robotics 提供遍布全球的機器人,我們是Franka/松靈/睿爾曼官方代理商,公司提供廣泛的機器人產品,包括 Franka reobots、AgileX Robotics、UR、XArm Gelsight、Aubo 機器人、Kinova、Realman 機器人、DH-Robotics、Robotiq、Hinyeung 3D 機器視覺產品等 提供定制化的科研系統,如雙臂類人機器人系統 為了提高您的研究效率,我們可以提供許多開源機器人系統 擁有豐富的項目經驗,並為數百所大學和研究機構提供服務 我們可以在世界各地提供產品和服務,我們公司位於深圳。 香港,佛山, 寧波, 蘇州,香港, 韓國。 解決方案 提供客製化科研系統,雙臂人形機器人系統,移動巡檢機器人 松靈aloha平臺 kinova複合機器人系統 GELLO遙操作UR機器人 睿尔曼 巡检机器人 协作機器人 Franka Research 3 PIPER xArm7 睿爾曼 Kinova UR 靈巧手 LeapHand RH56DFTP RH56BFX 移動機器人平臺 松靈RANGER MINI 松靈HUNTER 2.0 CLEARPATH RIDGEBACK 無人機 DJI4Pro DJI3S EVO Max 4T 感測器 Pandar128 QT128 XT16 FRANKA RESEARCH 3 具有7個自由度,每個關節都配有扭矩感測器工業級姿勢重複性為 +/-0.1毫米有效載荷為 3公斤,可達 855 毫米,工作空間覆蓋率為 94.5%. 松靈PIPER 六軸輕量級機械臂,整機重量僅4.2KG +/-0.1mm的重複定位精度 有效載荷為1.5公斤,626mm超大工作半徑適配Python開發環境,簡化開發流程,拓寬應用邊界,相容ROS1、ROS2 松靈Cobot Magic 可用於雙臂移動操作的數據採集、自動化應用部署與智慧化任務執行支援斯坦福ALOHA等開源演算法的複現,為具身智慧數據採集提供一站式解決方案 合作夥伴